Continuous Batching
NOTEContinuous batching 是一种面向在线推理的调度机制,在每个 decode step 动态组织当前活跃请求,从而避免 padding 和长尾带来的资源浪费,提高系统吞吐、提高 GPU 利用率.
问题背景
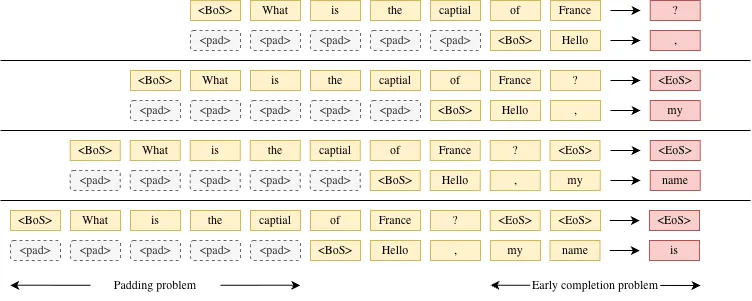
直接将多个请求简单拼成一个固定 batch 进行推理,会带来两个结构性问题:
- 长度不一致导致的 padding 浪费:不同请求的输入长度不同。为了将它们组织成规则 tensor 输入模型,通常需要对较短序列进行 padding。模型在计算时也会对这些“无效 token”执行 attention 和 FFN 计算,造成算力浪费。
- Decode 阶段的生命周期不同步(Tail Latency):在生成阶段,每个请求需要生成的 token 数量不同,而且生成长度在开始时是不可预测的。在固定 batch 机制下,只有当 batch 中最后一个请求完成生成后,整个 batch 才能结束并返回结果。因此,已经提前完成生成的请求会被迫等待最长的那个请求完成,导致尾延迟(tail latency)显著上升。
Continuous Batching
Continuous Batching 核心思想是以 batch 里面每个请求为单位进行组织,
- 调度单位从一整个 batch 变成 batch 里的每个请求
- 不同请求之间进度相互独立、互不影响
- 当一个请求结束(例如生成
<EoS>Token)立刻就被替换为新的请求: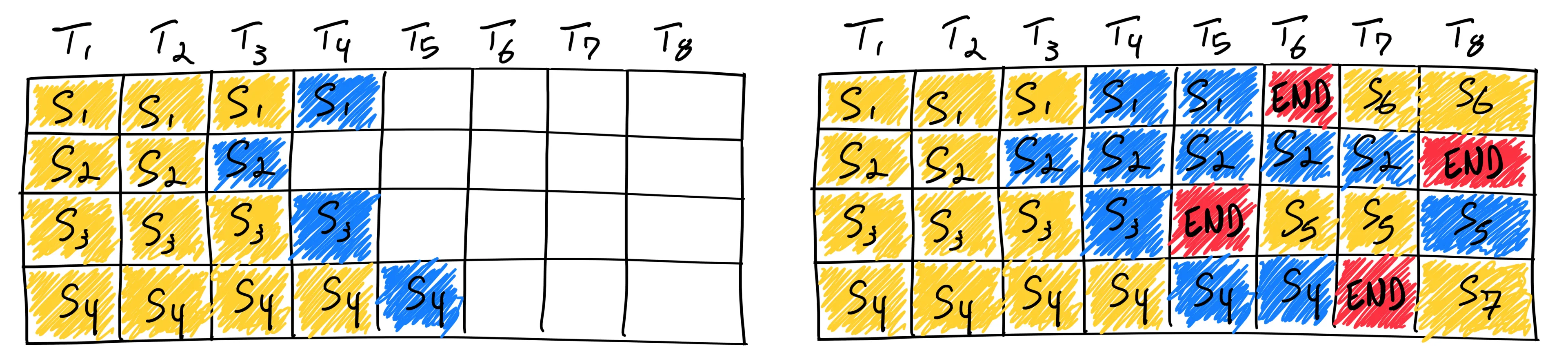
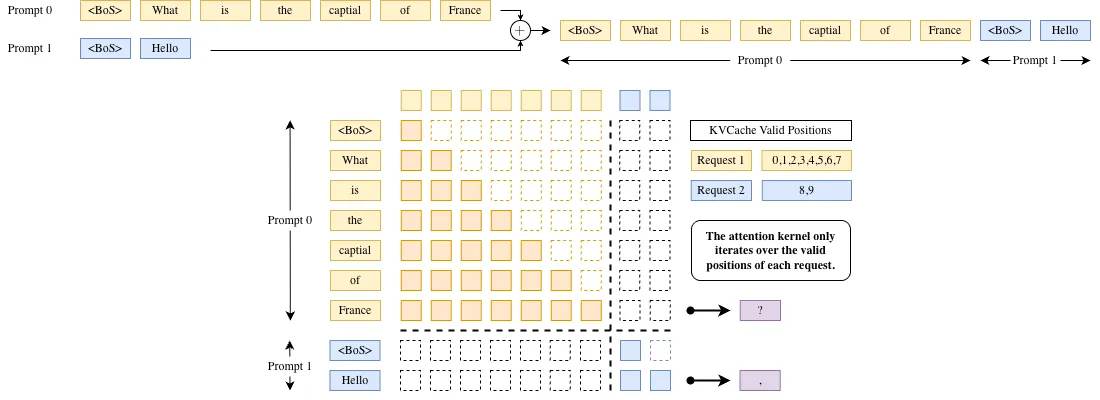
Continuous Batching 通常依赖于 ragged batching 技术来实现(ragged 意为拼接),即在同一个批次中拼接来自不同请求、长度不一的 token 序列。
Attention Mask 构造实现
为了保证不同请求之间互不干扰,可以通过构造块 block-diagonal 的 Causal Attention Mask 实现,确保每个请求的 token 仅与自身历史 token 进行 Attention 计算,而不会与其他请求的 token 发生交互。
优化:偏移实现 Mask
显式构造 大小的 Attention Mask 显然会带来巨大内存开销,我们希望避免显式构造 Attention Mask.
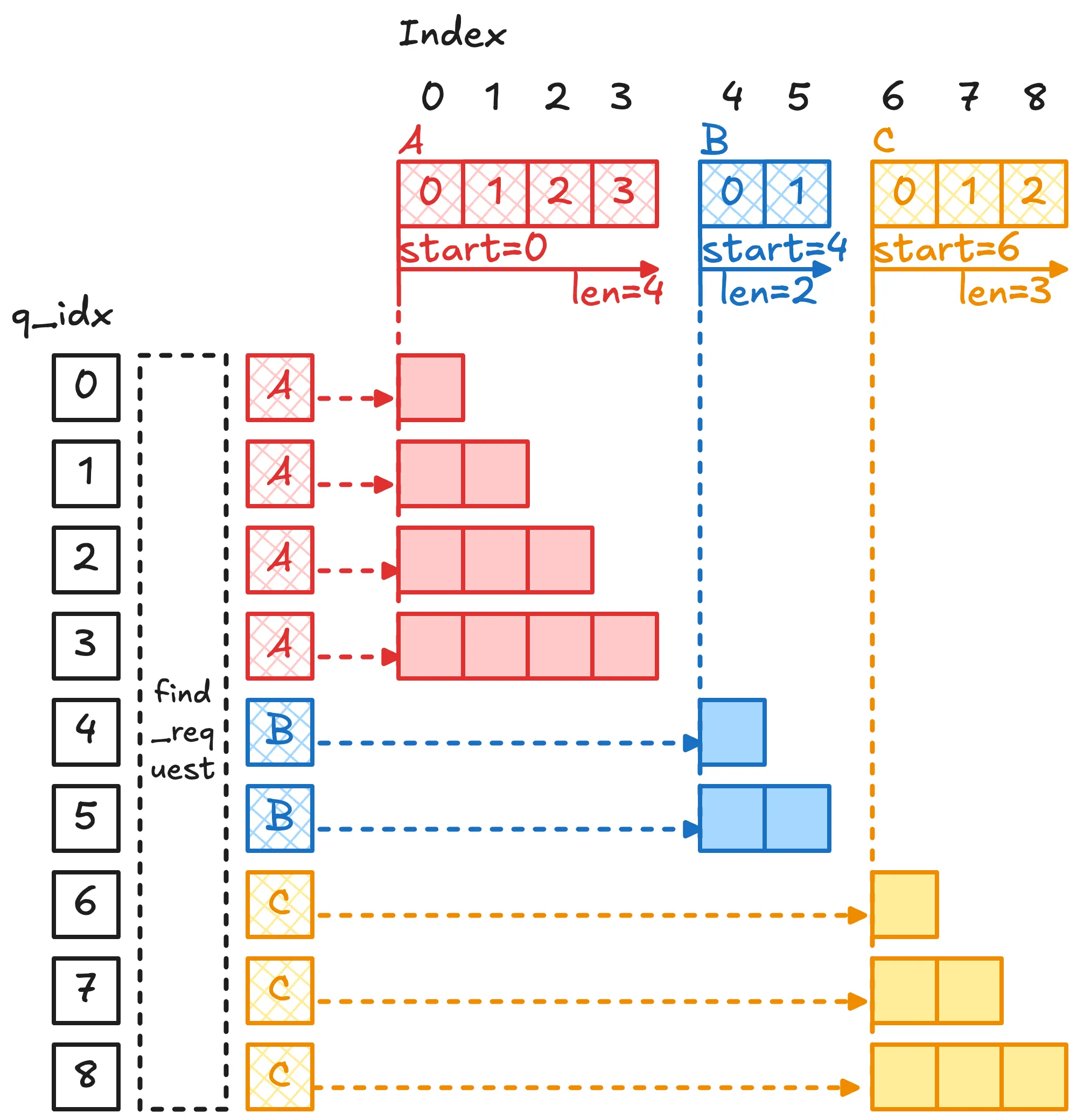
假设我们有以下几个请求:
A = [a0, a1, a2, a3] global index: 0,1,2,3
B = [b0, b1] global index: 4,5
C = [c0, c1, c2] global index: 6,7,8拼接之后变成了:
tokens = [a0,a1,a2,a3,b0,b1,c0,c1,c2]我们需要统计每个 request 在拼接之后的序列里的索引范围,因此记录 metadata:
seq_start_loc = [0, 4, 6];
seq_len = [4, 2, 3];假设每个 CUDA Kernel Thread 负责一个 向量,用伪代码表示可以为:
int q_idx = global_query_index;
// 通过 q_idx 找它属于哪个 request
int req_id = find_request(q_idx, seq_start_loc);
// 定位这个 request 的范围,以及确认这个 q 在序列中的位置
int start = seq_start_loc[req_id];
int local_pos = q_idx - start;
// request boundary + causal boundary
int kv_begin = start;
int kv_end = start + local_pos + 1;
for (int j = kv_begin; j < kv_end; ++j) {
score = dot(Q[q_idx], K[j]);
// softmax accumulate V[j]
}
扩展:vLLM v1 中的实现
TBD: 优化这一段
在 vLLM V1 中,这一过程进一步工程化。系统不会显式构造 attention mask,也通常不会让 CUDA thread 在 kernel 内部通过全局 token index 动态查找 request。相反,scheduler 会提前构造 attention metadata,例如 query_start_loc、seq_lens、slot_mapping 和 block_table。Attention backend 将这些 metadata 传给 FlashAttention / PagedAttention kernel。kernel 的 grid 或 scheduler metadata 已经将计算任务划分为某个 request 的某个 query tile / KV tile,因此 kernel 只需要根据 query_start_loc 和 seq_lens 确定 query/KV 边界,再通过 block_table 将逻辑 KV 位置映射到物理 KV cache block。这样,block-diagonal causal mask 不再是一个真实存在的矩阵,而是被转化为 kernel 内部的边界检查和 KV cache 地址映射。
// 简化理解:一个 CUDA Kernel Block 对应一个请求(或者请求的一个 tile)
int req_id = blockIdx.x;
int q_start = query_start_loc[req_id];
int q_end = query_start_loc[req_id + 1];
int q_len = q_end - q_start;
int seq_len = seq_lens[req_id];
// context_len 表示本轮 query 之前已有的历史 KV token 数量。
// 纯 prefill 时 context_len = 0;
// chunked prefill / prefix cache 命中 / decode 时,context_len > 0。
int context_len = seq_len - q_len;
// 当前 tile 内的 query 位置
int local_q = get_local_q_pos_inside_request();
// causal 边界
int max_kv_pos = context_len + local_q;
for (int kv_pos = 0; kv_pos <= max_kv_pos; ++kv_pos) {
// 逻辑 KV 位置 kv_pos
// 如果没有 paged cache:直接 K[request_offset + kv_pos]
// 如果有 paged cache:通过 block_table 找物理 KV block
// kv_pos 是 request 内部的逻辑位置
int logical_block = kv_pos / BLOCK_SIZE;
int block_offset = kv_pos % BLOCK_SIZE;
// 根据当前 request 的 block_table 找到真实物理 KV block
int physical_block = block_table[req_id][logical_block];
K = k_cache[physical_block][block_offset];
V = v_cache[physical_block][block_offset];
}假设 的 block_table 对应 [7, 18], 且 BLOCK_SIZE = 2.
那么当 kv_pos = 1 的时候,logical_block = 0, block_offset = 1, physical_block = 7,访问的是 physical block 7 的 offset 1,也就是 c1.
总结:对于某个 request,其 KV cache 在逻辑上是连续的(以 token 为单位),但在物理上存储在离散的 KV cache blocks 中。kernel 在计算 attention 时,会根据当前 request 的 block_table,将逻辑 KV 位置映射到对应的物理 KV cache block,从而只访问属于该 request 的 KV 数据。这样,请求之间的隔离并不是通过显式的 attention mask 实现,而是通过 request 级别的 metadata(如 block_table)以及 kernel 中的访问边界控制隐式完成的。
扩展:与 Chunked Prefill 结合
Continuous Batching 通常与 Chunked Prefill 结合使用。下图展示了在三个请求同时存在时的推理示例。在每一个调度 step 中,系统的执行流程如下:
- 对正在进行 Decode 的请求执行一次 forward 计算,各生成一个新的 token;
- 在剩余的计算预算内,调度处于 Prefill 阶段的请求,按 chunk 大小处理相应数量的 token;
- 当某个请求完成(Decode 结束)时,将其从当前 batch 中移除;
- 将新到达的请求或尚未完成 Chunked Prefill 的请求加入 batch,以维持持续的计算负载。
 Continuous Batching 在工程实现上通常结合 Paged Attention,以实现对 KV Cache 的更细粒度管理。若采用“一个 token 对应一个 block”的设计,会导致显存碎片化严重,并带来较高的元数据与调度开销。更高效的做法是使用固定大小的 Cache Block,每个 block 存储多个连续 token 的 KV 表示,从而在保持灵活分配能力的同时减少碎片化并提高内存利用率。
Continuous Batching 在工程实现上通常结合 Paged Attention,以实现对 KV Cache 的更细粒度管理。若采用“一个 token 对应一个 block”的设计,会导致显存碎片化严重,并带来较高的元数据与调度开销。更高效的做法是使用固定大小的 Cache Block,每个 block 存储多个连续 token 的 KV 表示,从而在保持灵活分配能力的同时减少碎片化并提高内存利用率。