ZeRO 和 FSDP:DP优化——将模型参数和中间状态分片到多卡
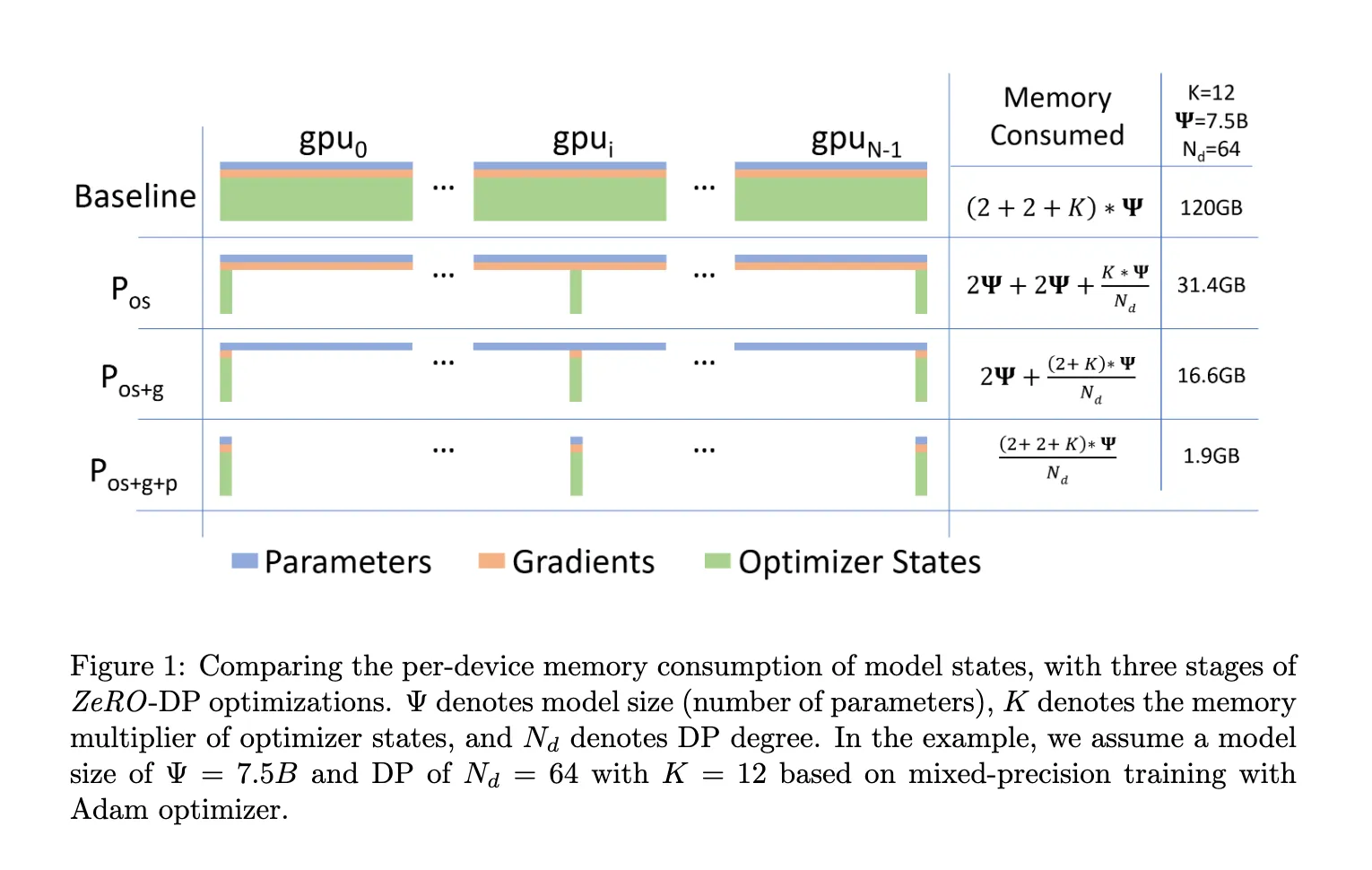
在传统数据并行中,每个设备都维护完整的模型参数、梯度以及优化器状态,导致显著的内存冗余。 ZeRO(Zero Redundancy Optimizer)通过对这些状态进行分布式切分来消除冗余存储,在可控的通信开销下显著降低单设备的内存占用。 ZeRO 分为三个阶段(ZeRO-1 至 ZeRO-3),其中 ZeRO-3 又称 FSDP,逐步对优化器状态、梯度以及模型参数进行切分。
参考论文:ZeRO: Memory Optimizations Toward Training Trillion Parameter Models
分布式训练流程
在数据并行训练中,每个设备都维护一份完整的模型参数,并在各自的数据子批次上独立计算梯度,随后通过同步操作(如 AllReduce)聚合梯度并更新模型。基于一个训练集 batch size 为 的分布式训练,在 step 时刻的参数更新过程可以表示为:
如下图所示,一个标准分布式训练的流程分为以下几个步骤:
- 前向传播:每个 rank 使用完全相同的模型参数跑不同的数据 batch shard,各自计算出不同的 loss
- 反向传播:对于每一层:
- 每个 rank 先算本地梯度
- 然后进行 AllReduce,同步每个 rank 的梯度
- 参数更新(Optimizer step):
- 在完成梯度同步之后,每个 rank 都已经有完全一致的梯度,每个 rank 独立执行 optimizer.step()
- 这一步运算对于所有 rank 都完全相同
训练时模型参数内存占用
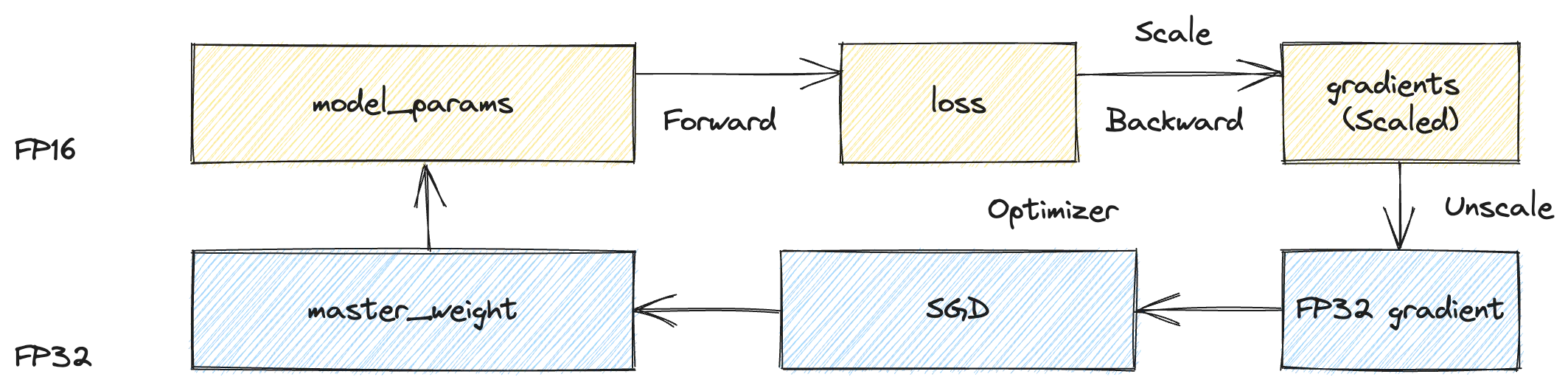
在混合精度分布式训练中,每个模型参数不仅需要存储其本身,还需要额外维护与训练过程相关的多种状态。
- 模型参数通常以 FP16 或 BF16 格式存储,占用 2 字节;
- 在反向传播过程中还需存储对应的梯度,同样占用 2 字节。
- 为了保证数值稳定性,优化器(如 Adam)通常额外维护一份 FP32 精度的 master weights,用于执行高精度的参数更新,这部分占用 4 字节。
- Adam 优化器还需要维护一阶和二阶矩(即梯度的指数滑动平均和平方的指数滑动平均),分别用于估计动量和方差。这两部分通常以 FP32(或 BF16)格式存储,各占用 4(或 2)字节。
因此,在标准配置下,一个参数的总内存开销约为 16 字节。由此可以看出,训练过程中参数本身只占一小部分内存,绝大多数开销来自于优化器状态。
Naive DP
在 Naive Data Parallelism 中,每个 rank 维护完整的模型参数与优化器状态。在每一步训练过程中,各 rank 需要通过 AllReduce 同步梯度,其通信开销与模型参数规模线性相关。对于使用 FP16/BF16 梯度的情况,总通信量约为 bytes(以 ring allreduce 为例)。(第一个 2 来源于 AllReduce,需要先 Reduce-scatter 再进行 All-gather 操作)
ZeRO
ZeRO-1
ZeRO-1 对优化器状态进行分片,即意味着不再让每个 rank 保存全部参数的优化器状态,而是每个 rank 仅负责其中一部分参数对应的优化器状态。优化器状态分布式存储在不同 rank 上,降低了每个设备上的内存占用。
每个模型仍然持有完整的模型参数和梯度数据,因此前向和反向传播过程仍然不变。但是在梯度同步过程中:
- 每个 rank 计算出所有参数的局部梯度
- 执行 All-Reduce 使得每个 rank 都获得完整梯度
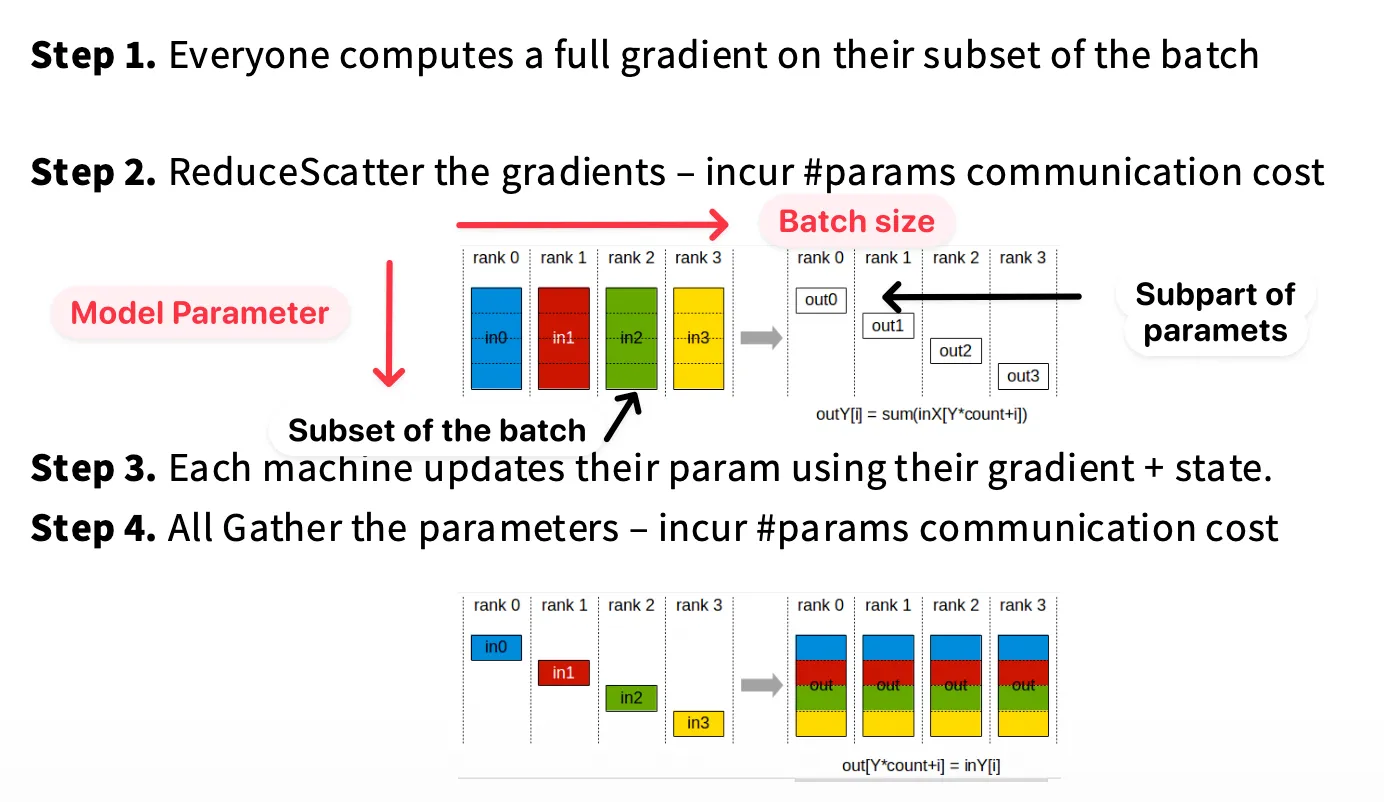
- ZeRO-1 将优化器状态按照参数维度进行分片,因此每个 rank 只持有自己负责那部分参数对应的优化器状态。 于是 optimizer step 时,每个 rank 只负责更新自己那部分参数,计算出对应的更新后参数分片
- 由于每个 rank 只计算出了一部分更新后的参数,为了保证下一轮前向传播能够使用完整且一致的模型参数,需要在 optimizer step 之后执行 All-Gather:将各个 rank 计算出的更新后参数分片同步回所有 rank,使每个 rank 再次拥有完整模型参数
在具体实现上,第二步的 All-Reduce 可以优化为 Reduce-Scatter:各个 rank 先对完整参数的本地梯度进行聚合,然后按照参数分片将聚合后的梯度分发给对应 rank。这样每个 rank 只获得自己负责那部分参数的全局梯度,用于更新对应的优化器状态和参数分片。
本质上来说,原先在数据并行中,每个 rank 都基于相同的完整梯度,对完整模型参数执行完全相同的 optimizer 更新,这一步存在冗余计算和冗余的 optimizer state 存储。在 ZeRO-1 中,这一步被按参数维度并行化:不同 rank 只负责一部分参数对应的 optimizer 更新。
因此相较于 Naive 版本实现:
- 通信原语改变:All-Reduce 变成 Reduce-Scatter + All-Gather
- 通信量:没有发生变化。
只是把一次 2 拆分成两次进行 - 存储量:假设优化器状态相关需要 (如前文分析,),则从 变成 per rank.
ZeRO-2
在 ZeRO-1 中我们在每个 rank 只负责更新一部分参数,但事实上我们不需要在每个 rank 上都获得完整梯度,只需要获得自己负责更新参数的梯度即可。
因此我们讲 ZeRO-1 的第二步“各个 rank 先对完整参数的本地梯度进行聚合,然后按照参数分片将聚合后的梯度分发给对应 rank”改为:
在反向传播过程中,每一层的梯度一旦计算出来,就立即通过 Reduce-Scatter 与其他 rank 进行聚合,并按照参数分片分发到对应 rank。 这样,每个 rank 最终只保留自己负责参数的那部分全局梯度,而不是完整梯度。
ZeRO-2 将原先每个 rank 全部完成 backward 计算之后统一进行一次 All-Reduce 改为多次小通信(每一层计算梯度完成之后即立刻 Reduce-Scatter),但由于可以和计算 overlap 因此影响不大。
ZeRO-3 (FSDP)
ZeRO-3 也被称为 Fully-Sharded Data Parallel (FSDP),其核心思想:不仅对优化器状态和梯度进行分片,也对模型参数本身进行分片存储。
- 每个 rank 只存储自己负责的那一部分模型参数,而不是完整模型
- 参数和梯度都采用“按需获取,用完即释放”的策略,而不是长期驻留在显存中
- 但前向和反向传播计算依赖完整参数,如果参数未准备好,则无法执行计算
- 因此,需要在计算之前提前预取参数,并尽可能将通信与计算进行重叠
- 考虑到计算前向的时候,除了当前 rank 需要的层之外,其余的层的参数可以抛弃;因此采取在当前层进行前向/反向推理时,同时进行下一层模型参数的预取。
现在 Forward pipeline 变成
async_prefetch(next_layer_group.params); // async all_gather 下一组参数
for layer_group in model:
wait(layer_group.params); // 确保当前参数已经 ready
forward(layer_group);
free(layer_group.params); // 释放临时 gathered 参数
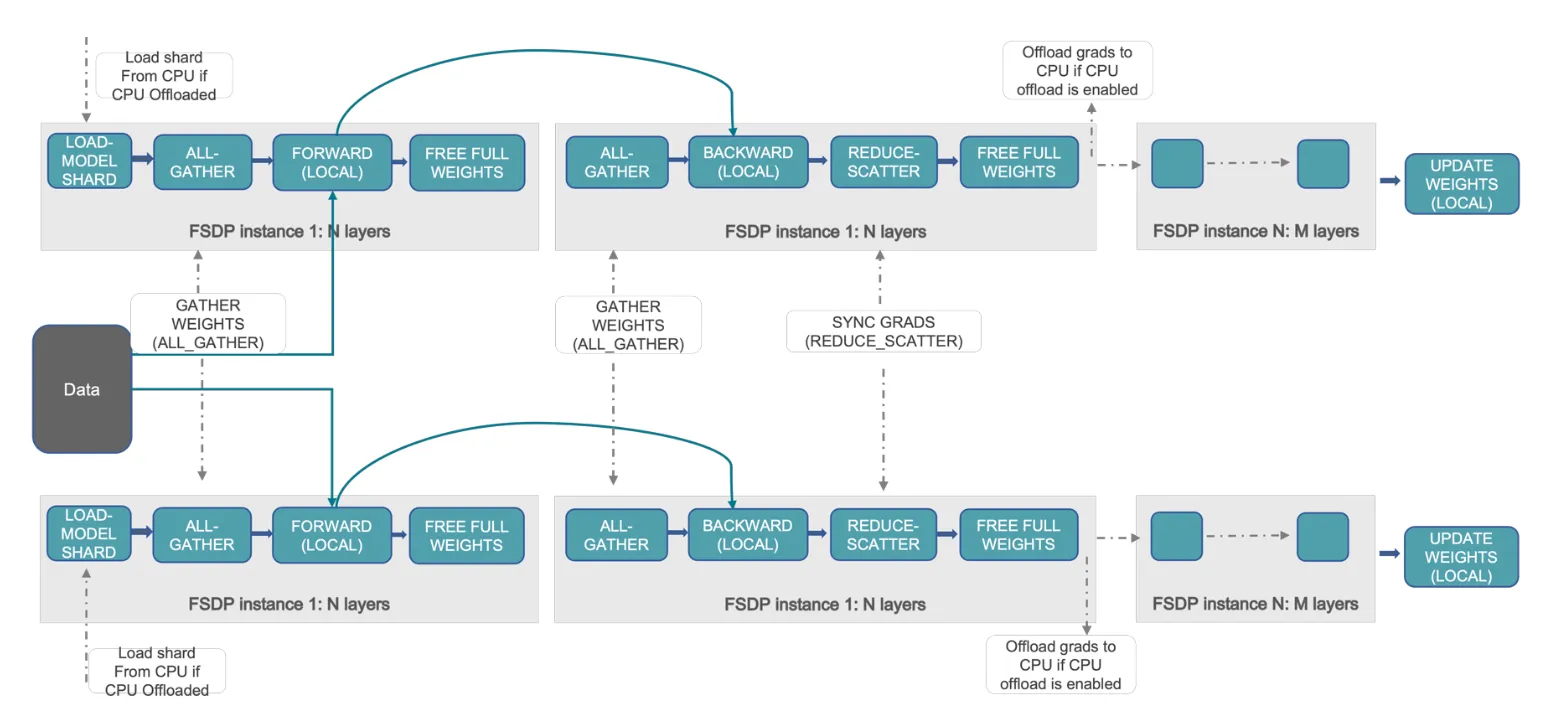
async_prefetch(next_layer_group.params); // 异步拉取下一组参数如下图所示,现在训练过程在:
- 计算一个特定的层的 forward 过程之前,使用 AllGather 获取模型该层所需的前置的层的参数。结束后释放掉不属于该rank分片的层的参数
- 计算一个特定的层的 backward 过程之前,使用AllGather获取该层所需要的层之前过程的参数。结束后释放掉不属于该rank分片的层的参数
- 在完成 backward 得到局部梯度之后,依然需要做 Reduce-scatter 等。
注:【与不同 rank 同步之间的问题】由于 AllGather 是一种 collective communication,其完成依赖于所有 rank 提供各自的参数分片,因此各个 rank 不需要显式同步控制流,但会在参数数据依赖处形成隐式同步。这种机制保证了各个 rank 在执行过程中不会出现计算进度的偏离(例如层级错位)