Flash Attention V2 在 Flash Attention V1 的基础上,从计算模式与并行策略两个层面进行了共四点系统性优化。在算法层面,FA2 减少了非矩阵乘法运算(例如不必要的 rescale 和 normalize 等逐元素操作),使整体计算过程更加接近连续的 GEMM。同时,对于 causal masking,FA2 采用了更高效的处理方式,尽量避免在被 mask 的区域上进行无效计算,进一步提升了计算效率。
在并行化方面,FA2 沿 sequence length(即 Q 维度)引入了更细粒度的并行划分,将原本较粗粒度的计算任务拆分并分配给更多的 thread block,从而显著提高了硬件并行度与资源利用率。在 thread block 内部,FA2 重新设计了 warp 的工作分配方式,使不同 warp 分别负责不同的 Q 子块(对应不同输出行),从而避免多个 warp 同时对同一输出进行并行写入且避免了对中间结果的合并需求,显著降低了 warp 间的同步与通信开销。
参考论文:FlashAttention-2: Faster Attention with Better Parallelism and Work Partitioning
问题背景
Attention 计算可以建模为:
FlashAttention V1 将 Q 按 sequence 维度切分为若干块 Qi,同时将 K, V 也按 sequence 维度切分为 Kj,Vj。对于任意 Qi,其对应的输出 Oi 需要与所有的 (Kj,Vj) 进行交互计算。具体而言,FlashAttention 通过遍历所有 KV 块 j,逐步累积计算 Oi。 下图展示了单步 (i,j)∈[[1,n]]2,(Q(i),{K,V}(j))→UpdateOi 的计算过程:
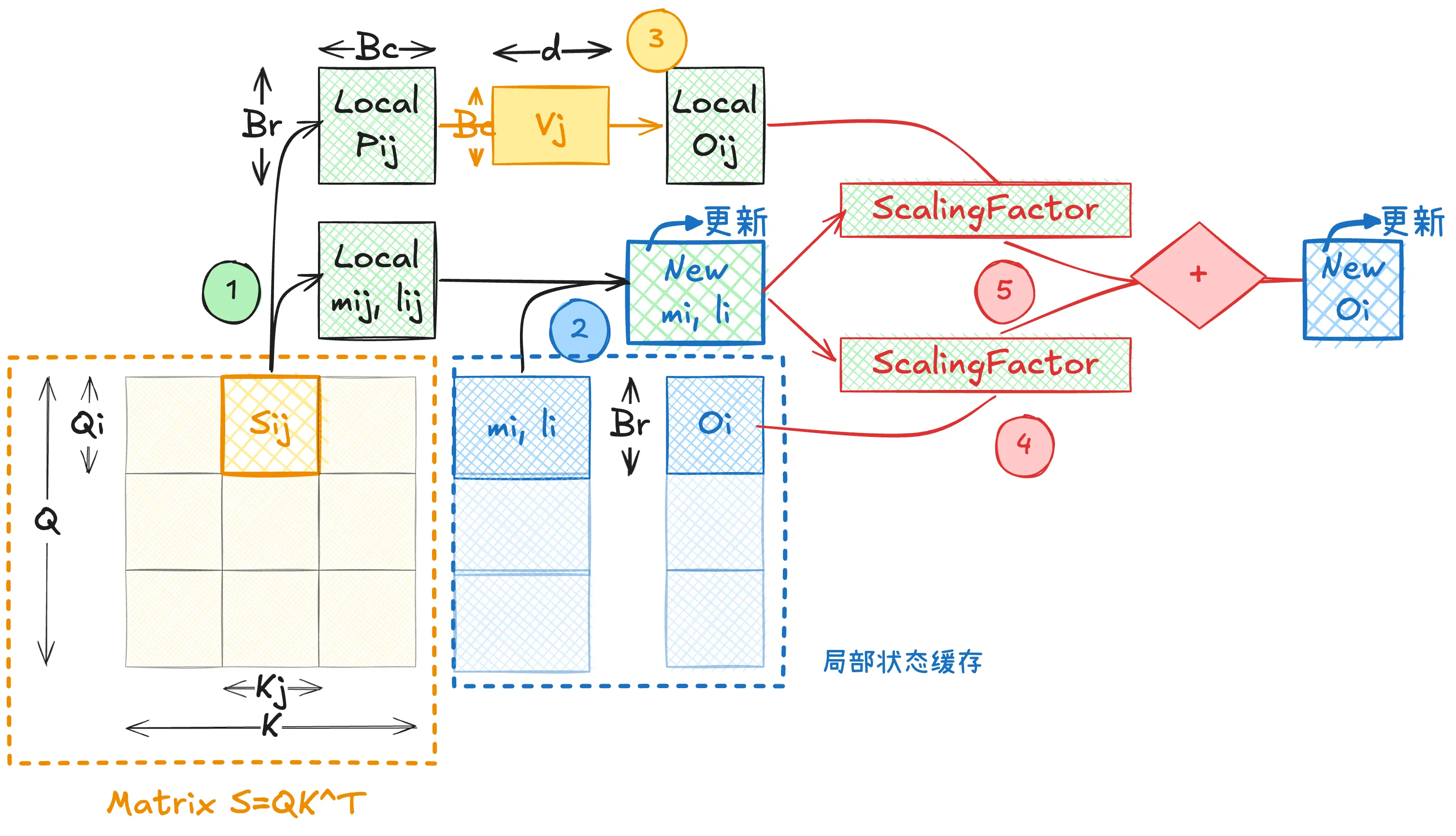
在 Flash Attention V1 实现中,维护局部变量 (mi,li,Oi),对于每个 tilde 进行计算时将其进行更新。
对于局部变量计算有(第一步):
⎩⎨⎧m~ijP~ijl~ijO~ij=rowmax(Sij)∈RBr,=exp(Sij−m~ij)∈RBr×Bc,=rowsum(P~ij)∈RBr.=P~ijVj∈RBr×d.状态更新 (mi,li)→(minew,linew) 式子(第二步):
{minewlinew=max(mi,m~ij)∈RBr,=li⊙emi−minew+l~ij⊙em~ij−minew∈RBr.最终更新输出矩阵 Oi→Oinew(第三-五步):
⎩⎨⎧Ni=diag(li)Oi.Φi=diag(emi−minew)Ni=diag(liemi−minew)Oi.Δi=diag(em~ij−minew)O~ij.Oinew=diag(linew)−1(Φi+Δi)∈RBr×d.算法优化
减少非矩阵乘法运算
Flash Attention V2 观察到如果将维护的输出矩阵 Oi 改成 online softmax “分子累积量”的输出矩阵 Ni,可以节省在每个 step 中 Oinew 的归一化计算,即Ninew 与局部 diag(linew)−1 的乘法计算。 这一步变成只有最后一个 tilde 才执行。
需要注意的是 Flash Attention V2 中 P~ij 与 Flash Attention V1 的定义不一样,且是完成状态更新 (mi,li)→(minew,linew) 后才运算的。为了表示区别,我在 FA2 定义的变量上加了个上标。
⎩⎨⎧P~ij(FA2)=exp(Sij−minew)Φi=diag(emi−minew)NiΔi=diag(em~ij−minew)O~ij⟹Δi=P~ij(FA2)VjNinew=Φi+Δi因此在 Flash Attention V2 中,维护的局部变量变成了 (mi,li,Ni),在循环结束后统一输出:
Oi=diag(li)−1Ni在原文中的算法是这么推导的: 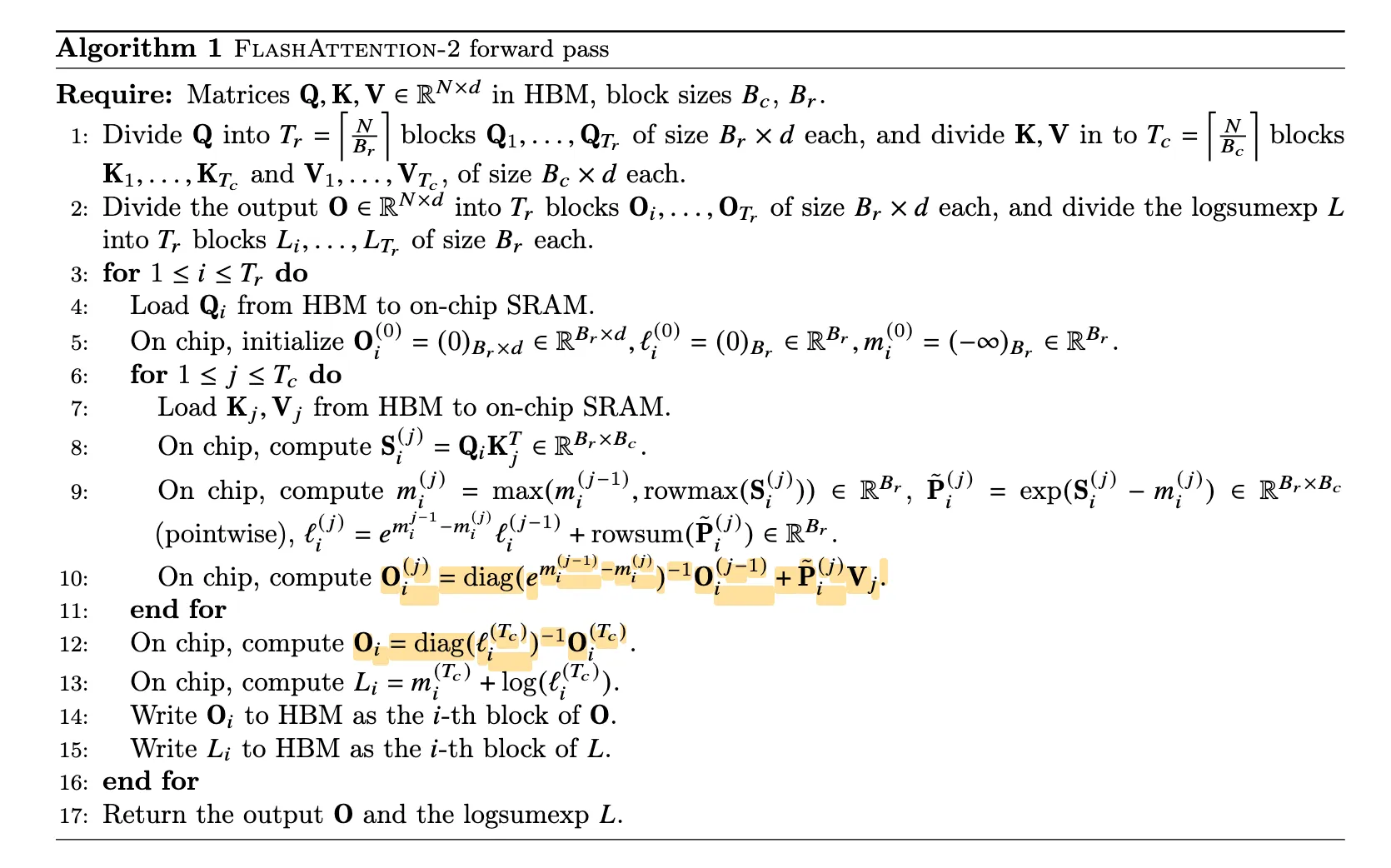
⚠️ 原文第 10 行有误,diag(…)−1 应该改为 diag(…)
看似只是减少了多次 diag−1 运算,但实际上优化效果非常好。这是因为在 GPU 中非矩阵乘法运算比矩阵乘法运算慢 16 倍,因此需要尽量减少非矩阵乘法的运算。
⚠️ 注意是矩阵乘法运算而不是矩阵运算之间的比较
Causal Masking 优化
在自回归模型中,由于 causal mask 的存在,attention 矩阵的上三角部分不会对结果产生贡献,因此在优化实现中可以跳过这些无效计算。Flash Attention 在分块计算过程中,也可以利用 mask 跳过部分上三角区域的计算。
内外循环位置变化
- softmax 操作在 row 维度上做,因此固定 Q,循环 {K,V} 想法更符合 softmax 特性
- 以 Q 为外循环,可以使中间状态 (m,l,O) 在寄存器中连续累积,而不需要在不同 warp 之间反复读取和合并,从而减少在 SHM 上的读写与同步开销
CUDA 层级优化
更细粒度的并行方式
FlashAttention-2 在 FlashAttention-1 的基础上,引入了更细粒度的并行划分方式。下图展示了 FA1 和 FA2 的并行划分方式区别:
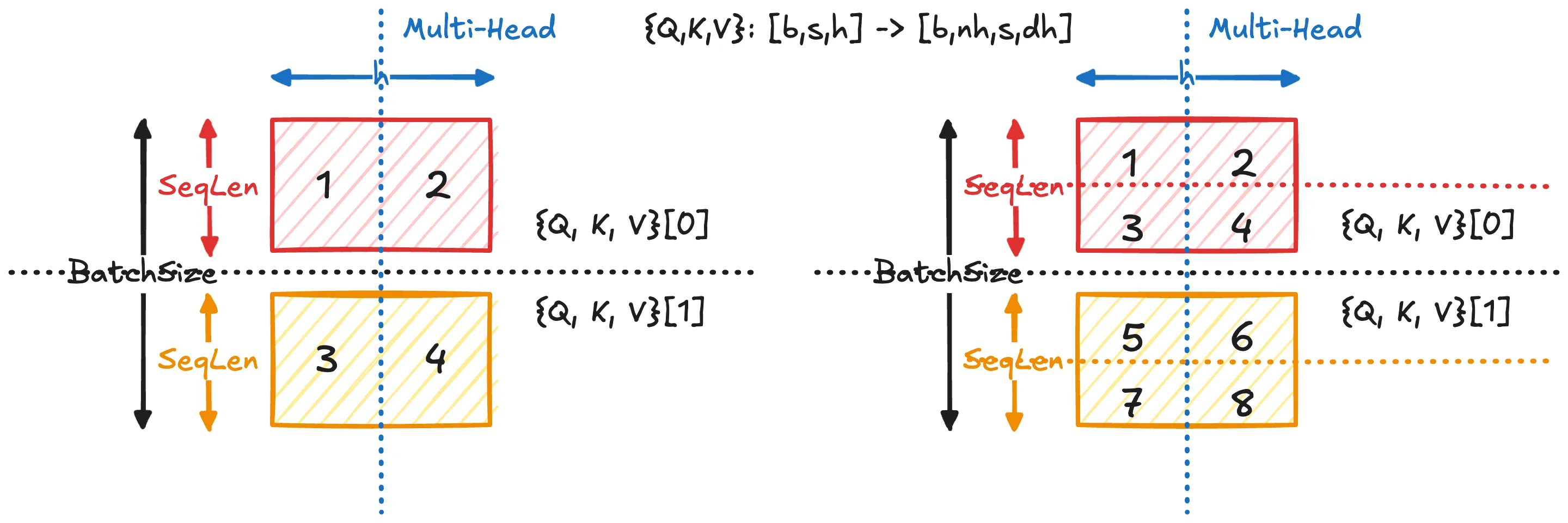
在 FA1 中,计算主要在 batch size 和 head 维度上并行,每个 CUDA thread block 通常负责一个 (b, h) 对应的 attention 计算,即 Attention(Q(b,h),K(b,h),V(b,h)). 这种方式的并行度受限于 b×nh,在序列较长时难以充分利用 GPU 计算资源。
FA2 在此基础上,
- 进一步在 sequence length(Q 的行维度)上进行切分
- 将单个 attention 的计算拆分为多个子任务
- 每个 thread block 仅负责一部分 Q(即若干 token)的 attention 计算,
- 而所有 block 共享完整的 K, V 并独立完成对应输出行的计算。
因此,FA2 的并行粒度从:
(b,h)→(b,h,Q-block)显著增加了 thread block 数量,使多个 block 能够协同计算同一个 attention,从而提升 GPU 的并行利用率和整体性能。
Warp 间工作量分配
下面我们研究单个 thread block 的工作 ∀i=(b,h,Q-block),(Qlocal,K,V)i→Oi 是如何分配给多个 GPU warp 执行的。
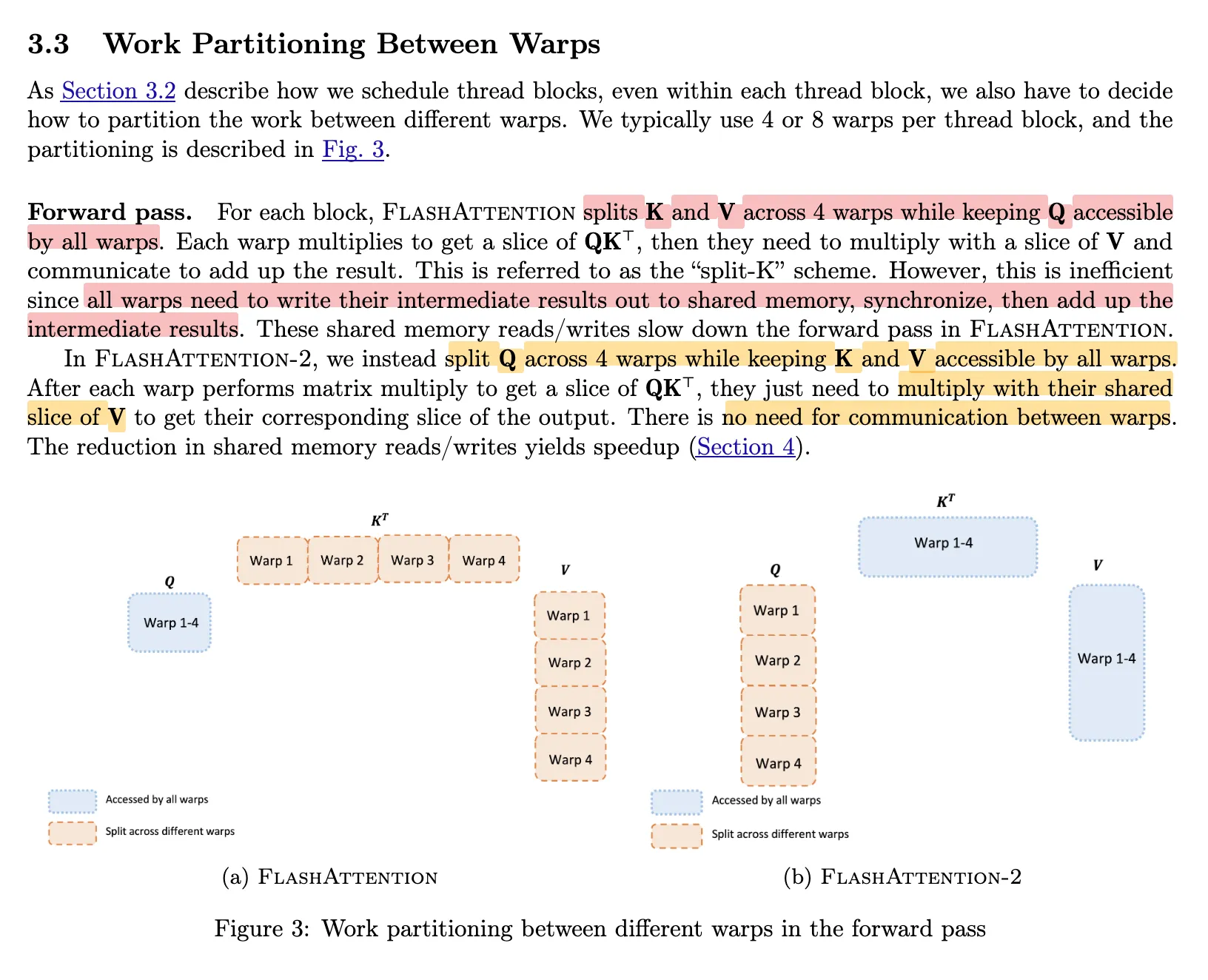
- 在 FA1 中,所有 warp 共享 Qlocal,i=Qi,并各自处理 {K,V}i 矩阵的不同子块。这意味着在多个 warp 并行执行之后,由于它们共同计算同一个 Oi 的部分结果,需要通过 shared memory 进行通信,并由一个 warp 统一进行合并(reduction)操作。
- 而在 FA2 中,所有 warp 共享 {K,V}i 矩阵(只读),但各自负责 Qlocal,i 的不同子块(即不同输出行)。由于不同 sequence 的 Q 维度之间没有依赖关系,是完全 embarrassingly parallel 的,因此每个 warp 可以独立完成对应的 Oi 子块计算,不需要进行跨 warp 的同步合并。
- FA2 将原本的通信开销转化为更加高效的独立计算,显著提升了整体性能。
下图是原文论文表述。紫色块表示不同 warp 之间共享的矩阵,绿色块表示各个 warp 负责的不同子块的数据。
参考资料